










SnekBot หุ่นยนต์เล่นบันไดงู
SnekBot อันนี้เป็นโปรเจควิทย์ของผมครับ โดยได้รับทุนสนับสนุนจากโครงการ JSTP ของ สวทช. ซึ่งนักเรียนที่ได้รับคัดเลือกให้เข้าโครงการจะมีโปรเจคคนละ 1 ชิ้น จะทำเรื่องอะไรก็ได้ที่ตัวเองสนใจและมีอาจารย์ที่ปรึกษาดูแล ผมคิดว่าเรื่องหุ่นยนต์เป็นสิ่งที่น่าสนใจและได้ฝึกทักษะหลายอย่างทั้งการประดิษฐ์และเขียนโปรแกรม ก็เลยเอาเซ็ด LEGO Mindstorms EV3 ที่มีอยู่มาต่อ ให้เป็นหุ่นยนต์ และเขียนโปรแกรมให้เป็นหุ่นยนต์ที่สามารถเล่นเกมบันได้งูกับคนได้ โดยเซ็ตจำนวนผู้เล่นสูงสุดไว้ 4 คนครับ
 |
|

ผมทดสอบนำไปเล่นกับเด็กๆแล้วได้รับความสนใจมาก จึงนำมาลงไว้ในเว็บเผื่อเพื่อนๆหรือน้องๆที่สนใจจะลองต่อตามและเขียนโปรแกรมไว้เล่นดูบ้าง
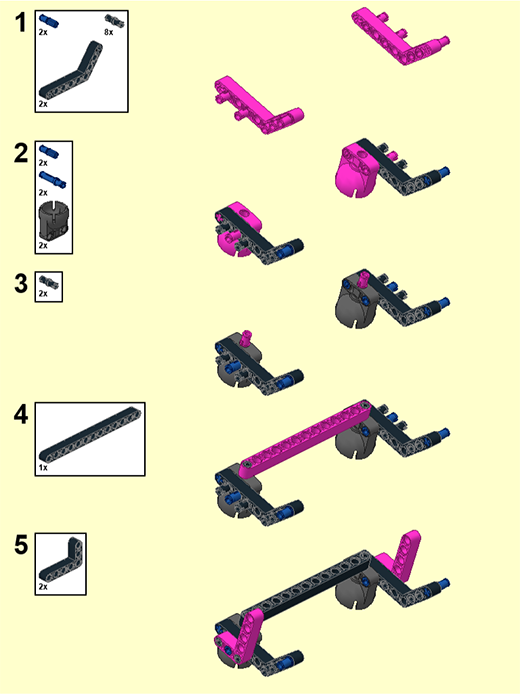
ในการประกอบหุ่นยนต์ SnekBot ผมเตรียมคู่มือการประกอบให้แล้วครับ ใช้ชิ้นส่วน LEGO Technic และอุปกรณ์หลักของ EV3 ตามนี้; | EV3 Brick *1 | Gyro Sensor *1 | Color Sensor *1 | Large Motor *2 | Medium Motor *2 |
|
สำหรับชิ้นส่วน Lego ที่ต้องการ ดูจากคู่มือข้างล่างนี้ได้เลยครับ มีรายละเอียดชิ้นส่วน และวิธีการประกอบไว้ให้แล้วครับ
|
โปรแกรมสำหรับ SnekBot จะปรับได้ตามกระดาน ได้แก่ จำนวนช่อง เช่น 5x5 ช่อง หรือไม่เป็นจตุรัส เช่น 5x3 เป็นต้น ซึ่งกระดานที่ใช้ปัจจุบันจะเป็นขนาด 4x4 ช่อง แต่ละช่องขนาด 12x12 นิ้ว |

โปรแกรมสำหรับ SnekBot จะปรับได้ตามกระดาน ได้แก่ จำนวนช่อง เช่น 5x5 ช่อง หรือไม่เป็นจตุรัส เช่น 5x3 เป็นต้น ซึ่งกระดานที่ใช้ปัจจุบันจะเป็นขนาด 4x4 ช่อง แต่ละช่องขนาด 12x12 นิ้ว
![]() | คู่มือการประกอบหุ่นยนต์ SnekBot ฉบับเต็ม | โปรแกรม SnekBot พร้อมเล่นเกมบันไดงูได้เลย |
| คู่มือการประกอบหุ่นยนต์ SnekBot ฉบับเต็ม | โปรแกรม SnekBot พร้อมเล่นเกมบันไดงูได้เลย |


